´╝ü´╝üŠşĄš»çŠś»ňč║ń║ÄIplImage* ´╝łCŠÄąňĆúŠłľŔÇůŔ»┤2.1ń╣őň돚볊ťČšÜäŠÄąňĆú´╝░šÜäMatšÜäŔ«┐ÚŚ«Šľ╣ň╝ĆŔ»ĚňĆéŔÇâňŹÜŠľç´╝Ü
IplImageŠś»OpenCVńŞşCxCoreÚâĘňłćňč║šíÇšÜ䊼░ŠŹ«š╗ôŠ×ä´╝îšöĘŠŁąŔíĘšĄ║ňŤżňâĆ´╝îňůÂńŞşIplŠś»Intel Image Processing LibraryšÜäš«ÇňćÖŃÇéń╗ąńŞőŠś»IplImagešÜäš╗ôŠ×äňłćŠ×É´╝łŠŁąŔç¬OpenCVńŞşŠľçšŻĹšźÖ´╝Ühttp://www.opencv.org.cn/index.php/Cxcore%E5%9F%BA%E7%A1%80%E7%BB%93%E6%9E%84#IplImage´╝ë
typedef struct _IplImage
{
int nSize; /* IplImageňĄžň░Ć */
int ID; /* šëłŠťČ (=0)*/
int nChannels; /* ňĄžňĄÜŠĽ░OPENCVň篊Ľ░Šö»Šîü1,2,3 Šłľ 4 ńެÚÇÜÚüô */
int alphaChannel; /* ŔóźOpenCVň┐ŻšĽą */
int depth; /* ňâĆš┤ášÜäńŻŹŠĚ▒ň║Ž: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,
IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F ňĆ»Šö»Šîü */
char colorModel[4]; /* ŔóźOpenCVň┐ŻšĽą */
char channelSeq[4]; /* ňÉîńŞŐ */
int dataOrder; /* 0 - ń║ĄňĆëňşśňĆľÚóťŔë▓ÚÇÜÚüô, 1 - ňłćň╝ÇšÜäÚóťŔë▓ÚÇÜÚüô.
cvCreateImageňƬŔâŻňłŤň╗║ń║ĄňĆëňşśňĆľňŤżňâĆ */
int origin; /* 0 - ÚíÂÔÇöňĚŽš╗ôŠ×ä,
1 - ň║ĽÔÇöňĚŽš╗ôŠ×ä (Windows bitmaps ÚúÄŠá╝) */
int align; /* ňŤżňâĆŔíîŠÄĺňłŚ (4 or 8). OpenCV ň┐ŻšĽąň«â´╝îńŻ┐šöĘ widthStep ń╗úŠŤ┐ */
int width; /* ňŤżňâĆň«ŻňâĆš┤ኼ░ */
int height; /* ňŤżňâĆÚźśňâĆš┤ኼ░*/
struct _IplROI *roi;/* ňŤżňâĆŠäčňů┤ŔÂúňî║ňčč. ňŻôŔ»ąňÇ╝ڣךę║ňƬň»╣Ŕ»ąňî║ňččŔ┐ŤŔíîňĄäšÉć */
struct _IplImage *maskROI; /* ňťĘ OpenCVńŞşň┐ůÚí╗šŻ«NULL */
void *imageId; /* ňÉîńŞŐ*/
struct _IplTileInfo *tileInfo; /*ňÉîńŞŐ*/
int imageSize; /* ňŤżňâĆŠĽ░ŠŹ«ňĄžň░Ć(ňťĘń║ĄňĆëňşśňĆľŠá╝ň╝ĆńŞőimageSize=image->height*image->widthStep´╝ë´╝îňŹĽńŻŹňşŚŔŐé*/
char *imageData; /* ŠîçňÉĹŠÄĺňłŚšÜäňŤżňâĆŠĽ░ŠŹ« */
int widthStep; /* ŠÄĺňłŚšÜäňŤżňâĆŔíîňĄžň░Ć´╝îń╗ąňşŚŔŐéńŞ║ňŹĽńŻŹ */
int BorderMode[4]; /* Ŕż╣ÚÖůš╗ôŠŁčŠĘíň╝Ć, ŔóźOpenCVň┐ŻšĽą */
int BorderConst[4]; /* ňÉîńŞŐ */
char *imageDataOrigin; /* ŠîçÚ峊îçňÉĹńŞÇńެńŞŹňÉîšÜäňŤżňâĆŠĽ░ŠŹ«š╗ôŠ×ä´╝łńŞŹŠś»ň┐ůÚí╗ŠÄĺňłŚšÜä´╝ë´╝»ńŞ║ń║ćš║ኺúňŤżňâĆňćůňşśňłćÚůŹňçćňĄçšÜä */
}
IplImage;
šŤ┤ŠÄąŔ«┐ÚŚ«´╝Ü
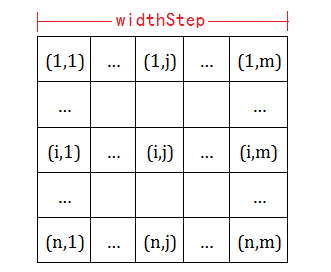
ň»╣ŠłĹń╗ČŠŁąŔ»┤Š»öŔżâÚçŹŔŽüšÜäńŞĄńެňůâš┤ኜ»´╝Üchar *imageDatań╗ąňĆŐwidthStepŃÇéimageDataňşśŠöżňŤżňâĆňâĆš┤ኼ░ŠŹ«´╝îŔÇîwidStepš▒╗ń╝╝CvMatńŞşšÜästep´╝îŔíĘšĄ║ń╗ąňşŚŔŐéńŞ║ňŹĽńŻŹšÜäŔí░ŠŹ«ÚĽ┐ň║ŽŃÇé
ńŞÇńެm*nšÜäňŹĽÚÇÜÚüôňşŚŔŐéň×őňŤżňâĆ´╝îňůÂimageDataŠÄĺňłŚňŽéńŞő´╝Ü
ňŽéŠ×ťŠłĹń╗ČŔŽüÚüŹňÄćňŤżňâĆńŞşšÜäňůâš┤á´╝îňƬڝǴ╝Ü
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
uchar* tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
*tmp=((uchar *)(img->imageData + i*img->widthStep))[j];
Ŕ┐ÖšžŹšŤ┤ŠÄąŔ«┐ÚŚ«šÜ䊾╣Š│ĽÚÇčň║Žň┐ź´╝îńŻćň«╣Šśôňç║ÚöÖ´╝Ĺń╗ČňĆ»ń╗ąÚÇÜŔ┐çň«Üń╣ëŠîçÚ峊ŁąŔ«┐ÚŚ«ŃÇéňŹ│´╝Ü
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
ucha* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
uchar* tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
*tmp=data[i*step+j];
ŔÇîňĄÜÚÇÜÚüô´╝łńŞëÚÇÜÚüô´╝ëňşŚŔŐéňŤżňâĆńŞş´╝îimageDataŠÄĺňłŚňŽéńŞő´╝Ü
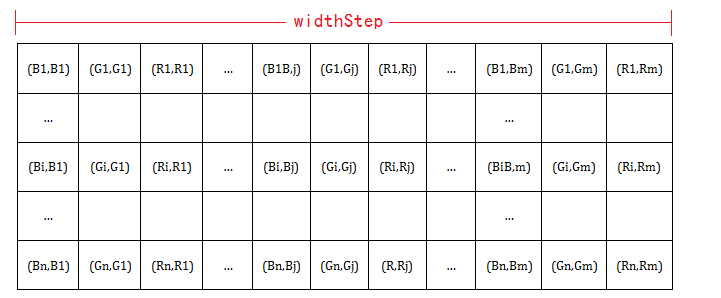
ňůÂńŞş´╝łBi,Bj´╝ë´╝łGi,Gj´╝ë´╝łRi,Rj´╝ëŔíĘšĄ║ňŤżňâĆ´╝łi,j´╝ëňĄäBGRňłćÚçĆšÜäňÇ╝ŃÇéńŻ┐šöĘŠîçÚĺłšÜäÚüŹňÄ抾╣Š│ĽňŽéńŞő´╝Ü
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
uchar* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
int channels = img->nChannels;
uchar *b,*g,*r;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
*b=data[i*step+j*chanels+0];
*g=data[i*step+j*chanels+1];
*r=data[i*step+j*chanels+2];
}
*ňŽéŠ×ťŔŽüń┐«Šö╣ŠčÉňâĆš┤áňÇ╝´╝îňłÖšŤ┤ŠÄąŔÁőňÇ╝ŃÇé
ńŻ┐šöĘcvGet2D()ň篊Ľ░Ŕ«┐ÚŚ«´╝Ü
cvGet*Dš│╗ňłŚň篊Ľ░ňĆ»ń╗ąšöĘŠŁąŔ┐öňŤ×šë╣ň«ÜńŻŹšŻ«šÜ䊼░š╗äňůâš┤á´╝łńŞÇŔłČńŻ┐šöĘcvGet2D´╝ë´╝îňÄčň×őňŽéńŞő´╝Ü
CvScalar cvGet1D( const CvArr* arr, int idx0 );
CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 );
CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 );
CvScalar cvGetND( const CvArr* arr, int* idx );
idx0,idx1,idx2ňłćňłźšöĘŠŁąŠî皥║ňůâš┤ኼ░š╗äńŞőŠáç´╝îňŹ│cvGet2DŔ┐öňŤ×´╝łidx0,idx1´╝ëňĄäňůâš┤ášÜäňÇ╝ŃÇé
ňŤáŠşĄ´╝îňŹĽÚÇÜÚüôňŤżňâĆňâĆš┤áŔ«┐ÚŚ«Šľ╣ň╝ĆňŽéńŞő´╝Ü
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
double tmp;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++)
tmp=cvGet2D(img,i,j).val[0];
ňĄÜÚÇÜÚüôňşŚŔŐéň×ő/ŠÁ«šé╣ň×őňŤżňâĆ´╝Ü
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);
double tmpb,tmpg,bmpr;
for(int i=0;i<img->height;i++)
for(int j=0;j<img->width;j++){
tmpb=cvGet2D(img,i,j).val[0];
tmpg=cvGet2D(img,i,j).val[1];
tmpr=cvGet2D(img,i,j).val[2];
}ňŽéŠ×ťŠś»ń┐«Šö╣ňůâš┤ášÜäňÇ╝´╝îňĆ»šöĘcvSet*D´╝łńŞÇŔłČŠś»cvSet2D´╝ëň篊Ľ░´╝Ü
void cvSet1D( CvArr* arr, int idx0, CvScalar value );
void cvSet2D( CvArr* arr, int idx0, int idx1, CvScalar value );
void cvSet3D( CvArr* arr, int idx0, int idx1, int idx2, CvScalar value );
void cvSetND( CvArr* arr, int* idx, CvScalar value );
Ŕ┐ÖšžŹŠľ╣Š│Ľň»╣ń║Äń╗╗ńŻĽňŤżňâĆšÜäŔ«┐ÚŚ«Šľ╣ň╝ĆŠś»ńŞÇŠáĚšÜä´╝öŔżâš«ÇňŹĽ´╝îńŻćŠĽłšÄçŔżâńŻÄ´╝îńŞŹŠÄĘŔŹÉńŻ┐šöĘŃÇé
ňłćń║źňł░´╝Ü




šŤŞňů│ŠÄĘŔŹÉ
ńŻ┐šöĘopencvŔÄĚňżŚňŤżňâĆńŞşŠ»ĆńŞÇšé╣šÜäňâĆš┤áňÇ╝ ňĆ»ń╗ąň»╣ňŤżňâĆńŞşšÜ䊻ĆńŞÇšé╣ňâĆš┤áňÇ╝Ŕ┐ŤŔíîňŹĽšőČšÜäŠôŹńŻť
ńŞëšžŹŠľ╣Š│ĽŔ«┐ÚŚ«ňŤżňâĆńŞşňâĆš┤ášÜäňÇ╝ŃÇé ňĆéŔÇâňŹÜŠľç´╝Ühttp://blog.csdn.net/xiaowei_cqu/article/details/7771760
//ň╝ÇňžőňĄäšÉ抻ĆńެňâĆš┤á (*it)[0] = (*it)[0] / div*div + div / 2; (*it)[1] = (*it)[1] / div*div + div / 2; (*it)[2] = (*it)[2] / div*div + div / 2; ++it; } } //ňŐĘŠÇüňť░ňŁÇŔ«íš«ŚňâĆš┤á void atColorReduce(Mat&...
ňťĘšü░ň║ŽňŤżňâĆńŞş´╝ĆńެňâĆš┤áÚ⯊ťëńŞÇńެšü░ň║ŽňÇ╝´╝Ĺń╗ČňĆ»ń╗ąň»╣šü░ň║Ž ňÇ╝Ŕ«żšŻ«ÚśłňÇ╝´╝îňâĆš┤áńŞÄÚśłňÇ╝Š»öŔżâ´╝ąň«×šÄ░ň»╣ňŤżňâĆŔ┐ŤŔíîšü░ň║ŽŔżâň░ĆňĺîŔżâňĄžšÜäňÖ¬ňú░Š╗ĄŠ│óňĄäšÉć´╝ľŔÇůš¬ü ňç║ňŤżňâĆńŞÄŔâîŠÖ»šÜäšü░ň║ŽňĚ«šşëšşëňŐčŔâŻŃÇé ÚśłňÇ╝ňôŹńŻťňťĘňŤżňâĆňĄäšÉćńŞşŠś»ńŞÇšžŹ...
Šś»ňč║ń║Äopencvň╝ÇňĆĹšÜä´╝îšöĘń║ÄŠčąšťőňŤżňâĆŠ»ĆńެňâĆš┤ášÜäšü░ň║ŽňÇ╝´╝żšĄ║ňŤżňâĆšÜäňŁÉŠáçňĺîšü░ň║ŽňÇ╝´╝»ň░ĆňĚąňůĚň«ëŔúůŔŻ»ń╗´╝îŠ▓튝ëŠĆÉńżŤń╗úšáü
Ŕ»ąŠľ╣Š│Ľň░ćňŤżšëçńŞşšÜäňâĆš┤ášťőńŻťšőČšźőšÜäšé╣´╝îň░抻Ćńެšé╣ńŞÄňůÂňĹĘňŤ┤šé╣šÜäńŞŹšŤŞń╝╝šĘőň║ŽšťőńŻťŔż╣šÜ䊣âňÇ╝´╝îšöĘň篊Ľ░ŔíĘšĄ║´╝îň╣ŠîëšůžńŞŹšŤŞń╝╝šĘőň║Žšö▒ň░Ćňł░ň»╣ňůÂŔżżŔ┐ŤŔíîŠÄĺň║Ć´╝îňćŹňłęšöĘŔ┤¬ň┐âš«ŚŠ│ĽÚÇÉŠŞÉň░暍Şń╝╝šĘőň║ŽŔżâÚźśšÜäšé╣Šłľňî║ňččŔ┐ŤŔíîňÉłň╣´╝îňŹ│ŠĽ┤ńŻôÚŚ«ÚóśšÜ䊝Çń╝śŔžú...
1´╝Ü Ŕżôňç║ńŞÇńެMatň»╣Ŕ▒íšÜäňâĆš┤á Ŕç¬ň«Üń╣ëńŞÇńެMat ň»╣Ŕ▒í´╝îšäÂňÉÄŔżôňç║ňâĆš┤áňÇ╝´╝łňâĆš┤áňÇ╝ňč║ŠťČÚâŻňťĘ 0 ÔÇô 255 ń╣őÚŚ┤ ´╝îňŤżňâĆńŞ║ńŞëÚÇÜÚüô´╝ë ... * ň░ĆňŤżňâĆšÜ䊻ĆńŞÇńެňâĆš┤áňÇ╝ŠłĹń╗ČÚ⯊ś»ščąÚüôšÜä´╝îňĆ»ń╗ąŔżôňç║Ščąšťő´╝îÚ¬îŔ»üš«ŚŠ│ĽŠşúší«ŠÇž´╝îšäÂňÉÄňťĘranňĄžňŤż *
ň░ćńŞÇň╝ášü░ň║ŽňŤżšÜäňâĆš┤áňÇ╝ŠŤ┤Šö╣ńŞ║ńŞÇňťł8ńެňâĆš┤ášé╣šÜäň╣│ňŁçňÇ╝´╝îC++ň«×šÄ░´╝îňĆĹňç║ŠŁąšÜäňÄčňŤáŠś»ŠłĹň»╣Ŕż╣šĽîšé╣šÜäňĄäšÉ抾╣Š│Ľ´╝îš«ÇŠ┤üŃÇé
ňĆ銼░Ŕ»┤ŠśÄ´╝Ü cv2.addň░ćńŞĄńެňŤżšëçň»╣ň║öńŻŹšŻ«šÜäňâĆš┤ášÜäňÇ╝šŤŞňŐá´╝ľŔÇůň░抻ĆńެňâĆš┤ášÜäňÇ╝ňŐáńŞŐńŞÇńެŠáçÚçĆňÇ╝´╝îňĄžń║Ä255šÜäňâĆš┤áňÇ╝ň░▒Ŕ«żšŻ«ŠłÉ255ŃÇé ŠťëńŞÇšé╣ÚťÇŔŽüŠ│ĘŠäĆšÜ䊜»´╝îňŽéŠ×ťŠś»ńŞĄň╝áňŤżšë皍ŞňŐá´╝îÚéúń╣łńŞÇň«ÜŔŽüŠ│ĘŠäĆńŞĄŔÇůšÜäň░║ň»ŞňĺîÚÇÜÚüôŠĽ░ň┐ůÚí╗Šś»ńŞÇŠáĚšÜä...
ň«âšÜäňÄčšÉ抜»ň»╣ňŤżňâĆńŞşšÜ䊻ĆńެňâĆš┤á´╝îń╗ąŔ»ąňâĆš┤áńŞ║ńŞşň┐âšÜäńŞÇńެš¬ŚňĆúňćůšÜäňâĆš┤áňÇ╝Ŕ┐ŤŔíîŠÄĺň║Ć´╝îšäÂňÉÄšöĘš¬ŚňĆúňćůŠÄĺň║ĆňÉÄšÜäńŞşÚŚ┤ňÇ╝´╝łňŹ│ńŞşňÇ╝´╝늣ąń╗úŠŤ┐Ŕ»ąňâĆš┤ášÜäňÇ╝ŃÇéŔ┐ÖšžŹŠľ╣Š│Ľň»╣ń║ÄňÄ╗ÚÖĄňÖ¬ňú░ŠĽłŠ×ťňżłňąŻ´╝îňÉÂŔâŻňĄčń┐ŁŠîüňŤżňâĆšÜäŔż╣š╝śń┐íŠü»ŃÇé ń╗ąńŞőŠś»ńŞÇńެ...
opencvň░ćňŤżšëçňłćŠłÉňĄÜńެ256*256ňâĆš┤ášÜäň░ĆňŤżšëç
OpenCVšÄ»ňóâńŞőńŻ┐šöĘC++Ŕ┐ŤŔíîňŤżňâĆň╣│šž╗ňĄäšÉć´╝îÚÇÜŔ┐çň»╣šŤŞň║öńŻŹšŻ«šÜ䊻ĆńެňâĆš┤ášé╣Ŕ┐ŤŔíîňĄŹňłÂ´╝»ŠťÇšČĘšÜäňŐ׊│Ľ´╝îŠ▒ŚŃÇé
ňŤżňâĆń┐«ňĄŹňťĘňŤżňâĆňĄäšÉćÚóćňččńŞÇšŤ┤Ú⯊ś»ňĄçňĆŚňů│Š│ĘšÜäÚŚ«Úóś´╝îÚÇÜŔ┐çň»╣ńŞÇň뻚╝║ŠŹčňŤżňâĆŔ┐ŤŔíîń┐«ňĄŹń╗ÄŔÇîńŻ┐ňůŠŚáÚÖÉšÜäŠÄąŔ┐ĹŠłľŔżżňł░ňÄčňžőňŤżňâĆšÜäňâĆš┤áń┐íŠü»ŠłľŔžćŔžëŠĽłŠ×ť´╝îŔ»ąŠŐÇŠť»ňťĘšĄżń╝ÜšöčŠ┤╗šÜäňÉäÚóćňč芝뚣ÇÚçŹŔŽüńŻťšöĘŃÇéCriminisiš«ŚŠ│ĽŠś»ńŞÇńެń┐«ňĄŹňĄžňî║ňččšá┤ŠŹč...
OpencvňâĆš┤áňĄäšÉćńŞÄŔ«┐ÚŚ« ň»╣ń║ÄňŤżňâĆňĄäšÉ抣ąŔ»┤´╝îňŽéŠ×ťŠłĹń╗Čń║ćŔžúňĄäšÉćňŤżňâĆšÜäňůĚńŻôš«ŚŠ│Ľ´╝îÚéúń╣łŠłĹń╗Čň░▒ňĆ»ń╗ąÚÇÜŔ┐皍┤ŠÄąŠôŹńŻťňŤżšëçšÜäňâĆš┤ášé╣ŠŁąň«×šÄ░Ŕ┐Öń║Ťš«ŚŠ│ĽŃÇéŠëÇń╗ąŠťČŠľçň░▒ŠÇ╗š╗ôńŞÇńŞőOpencvňâĆš┤á...ňüçňŽéšÜäňŹĽÚÇÜÚüôšÜäÚ╗ĹšÖŻňŤżšëç´╝ĆńެňâĆš┤ášé╣šöĘ0-255Ŕ┐Ö256
opencvšÜäňłćŠ░┤ň▓şš«ŚŠ│Ľ ňłćŠ░┤ň▓şňłćňë▓Šľ╣Š│Ľ´╝»ńŞÇšžŹňč║ń║ÄŠőôŠëĹšÉćŔ«║šÜä...ÚŽľňůłň»╣Š»ĆńެňâĆš┤ášÜäšü░ň║Žš║žŔ┐ŤŔíîń╗ÄńŻÄňł░ÚźśŠÄĺň║Ć´╝îšäÂňÉÄňťĘń╗ÄńŻÄňł░Úźśň«×šÄ░ŠĚ╣Š▓íŔ┐çšĘőńŞş´╝îň»╣Š»ĆńŞÇńެň▒ÇÚâĘŠ×üň░ĆňÇ╝ňťĘhÚśÂÚźśň║ŽšÜäňŻ▒ňôŹňččÚççšöĘňůłŔ┐Ťňůłňç║(FIFO)š╗ôŠ×äŔ┐ŤŔíîňłĄŠľşňĆŐŠáçŠ│ĘŃÇé
Šá╣ŠŹ«SobelňÄčšÉć´╝îňĆ»ń╗ąň«îňůĘŠśÄší«šÜ䊜»´╝ÜŠ»ĆńŞÇńެňâĆš┤ášé╣šÜäŠó»ň║ŽŔ«íš«ŚÚâŻńŞŹńżŁŔÁľń║ÄňůÂń╗ľšÜäňâĆš┤ášé╣´╝üŔ┐Öň░▒Šś»ň«×šÄ░ňĄÜŠáŞň╣ÂŔíîňĄäšÉćŔż╣š╝śŠúÇŠÁőšÜäňů│Úö«ŃÇéňłęšöĘŔ┐Öńެňů│Úö«šÜäšë╣ŠÇž´╝Ĺń╗ČňĆ»ń╗ąŔ«ęňĄÜńެŠáŞňÉÂňÄ╗Ŕ«íš«ŚňĄÜńެňâĆš┤ášé╣šÜäŠó»ň║ŽňÇ╝´╝îŔ┐ŤŔÇîŠĆÉÚźśSobelŔż╣š╝ś...
SGBMÚççšöĘŠ░┤ň╣│Sobelš«ŚňşÉ´╝îŠŐŐňŤżňâĆňüÜňĄäšÉć´╝îšäÂňÉÄšöĘńŞÇńެň篊Ľ░ň░ćš╗ĆŔ┐çŠ░┤ň╣│Sobelš«ŚňşÉňĄäšÉćňÉÄšÜäňŤżňâĆńŞŐŠ»ĆńެňâĆš┤ášé╣´╝łPŔíĘšĄ║ňůÂňâĆš┤áňÇ╝´╝늜áň░䊳ÉńŞÇńެŠľ░šÜäňŤżňâĆ´╝îŔíĘšĄ║Šľ░ňŤżňâĆńŞŐšÜäňâĆš┤áňÇ╝ŃÇ銜áň░äň篊Ľ░ňŽéńŞő´╝Ü preFilterCapńŞ║ńŞÇńެňŞŞŠĽ░ňĆ銼░...
1. š╗čŔ«íŔżôňůąňŤżňâĆńŞşŠ»ĆńެňâĆš┤áňÇ╝ňç║šÄ░šÜäÚóĹšÄç,ň╗║šźőňşŚšČŽňł░ÚóĹšÄçšÜ䊜áň░äŔíĘ 2. Šá╣ŠŹ«ÚóĹšÄçńŻ┐šöĘŠťÇň░ĆňáćŠ×äň╗║ Huffman ŠáĹ 3. Šá╣ŠŹ« Huffman ŠáĹńŞ║Š»ĆńެňâĆš┤áňÇ╝ŔÁőń║łńŞÇńެňĆ»ňĆśÚĽ┐ň║ŽšÜäń║îŔ┐ŤňłÂš╝ľšáü 4. ńŻ┐šöĘńŞŐńŞÇŠşąňżŚňł░šÜäš╝ľšáüň»╣ňÄčňžőňŤżňâĆŔ┐ŤŔíîš╝ľšáü 5...
ň«âň░ćGoogleňť░ňŤżňĺîGoogleňť░šÉâš╗ôňÉłňťĘńŞÇŔÁĚ´╝îňťĘLCDň▒Ćň╣ĽńŞŐŠáŞň»╣ňâĆš┤á´╝îší«ń┐ŁŔíČŔíźńŞŐšÜ䊻ĆńŞÇńެÚĺłŔäÜÚâŻň«îňůĘš╝ŁňÉłŃÇéOpenCVŠĆÉńżŤń║ćńŞÇńެš«ÇŠśôň«×šöĘšÜäŔ«íš«ŚŠť║ŔžćŔžëŠíćŠ×Âń╗ąňĆŐńŞÇńެňÉźŠťëŔÂůŔ┐ç500šžŹňĆ»ń╗ąň«×ŠŚÂŔ┐ÉŔíîŔžćŔžëń╗úšáüšÜäň篊Ľ░šÜäš╗╝ňÉłň║ôŃÇéŃÇŐňşŽń╣á...
2ŃÇüň░ćňŤżňâĆŔ┐ŤŔíîňĆîŔż╣Š╗ĄŠ│óňĄäšÉć´╝îšäÂňÉÄň░ćňâĆš┤áňÇ╝š╝ęščşńŞ║Š»Ć10ńެšü░ň║Žš║žńŞ║ńŞÇńެňÇ╝ 3ŃÇüň░ćňëŹńŞĄŠşąňżŚňł░šÜäš╗ôŠ×ťšŤŞń╣ś´╝żšĄ║š╗ôŠ×ť #include using namespace std; #include "opencv2/core.hpp" #include "opencv2/highgui.hpp" #...